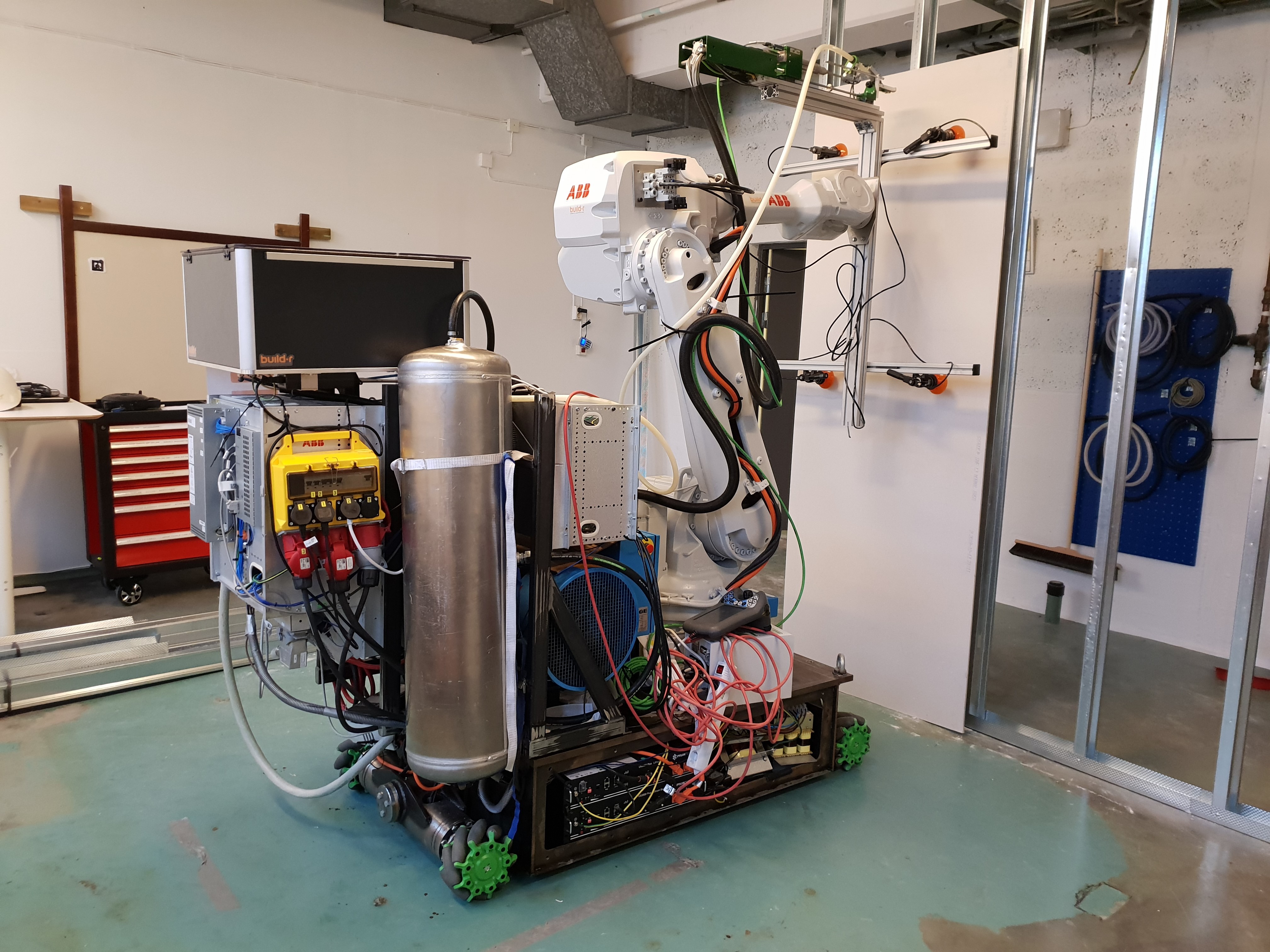



Komplett batteridriven prototyp av mobil robot för gipsinstallation (ABB Robotarm IRB4600 Ingår ej i objektet. Armen kommer demonteras innan utlämning)
Systemet består av en mobil plattform som kontrolleras via CAN-kommunikation.
Ett robust chassi i stål.
Ett batterisystem med 4*2.4 kwH lifepo batterier och tillhörande inverter. Via inverter sker både laddning och uttag från batterier (3-fas).
En inverter 230->24 V för drift av plattform.
Gripdon med vakumsystem
Automatiskt matad skruvdragare från Deprag, kontrollerad via profinet, i dagsläget inställd på 2-lagers gipsskruv. Komplett system med vibrationsmatare
Kompressor Boge CL7 för vakuumsystem och skruvmatning.
1 2D-laserscanner Sick PLS
”Byggbox” elcentral 400->230V
Dator Acer Aspire 5 med mjukvara för kontroll av systemet

